Sight to Sound
This is a sight-to-sound application; something that takes a camera input and outputs a spectrum of audio frequencies. The creative task is to choose a mapping from 2D pixel-space to 1D frequency-space in a way that could be meaningful to the listener. Of course, it would take someone a long time to relearn their sight through sound, but the purpose of this project is just to implement the software.
Used here, the mapping from pixels to frequencies is the Hilbert Curve. This particular mapping is desirable for two reasons: first, when the camera dimensions increase, points on the curve approach more precise locations, tending toward a specific point. So increasing the dimensions makes better approximations of the camera data, which becomes "higher resolution sound" in terms of audio-sight. Second, the Hilbert Curve maintains that nearby pixels in pixel-space are assigned frequencies near each other in frequency-space. By leveraging these two intuitions of sight, the Hilbert curve is an excellent choice for the mapping for this hypothetical software.
The video below demonstrates the concept in Max. For a better understanding, check out this video by YouTube animator 3Blue1Brown: link
Here is a walkthrough of the code:

|
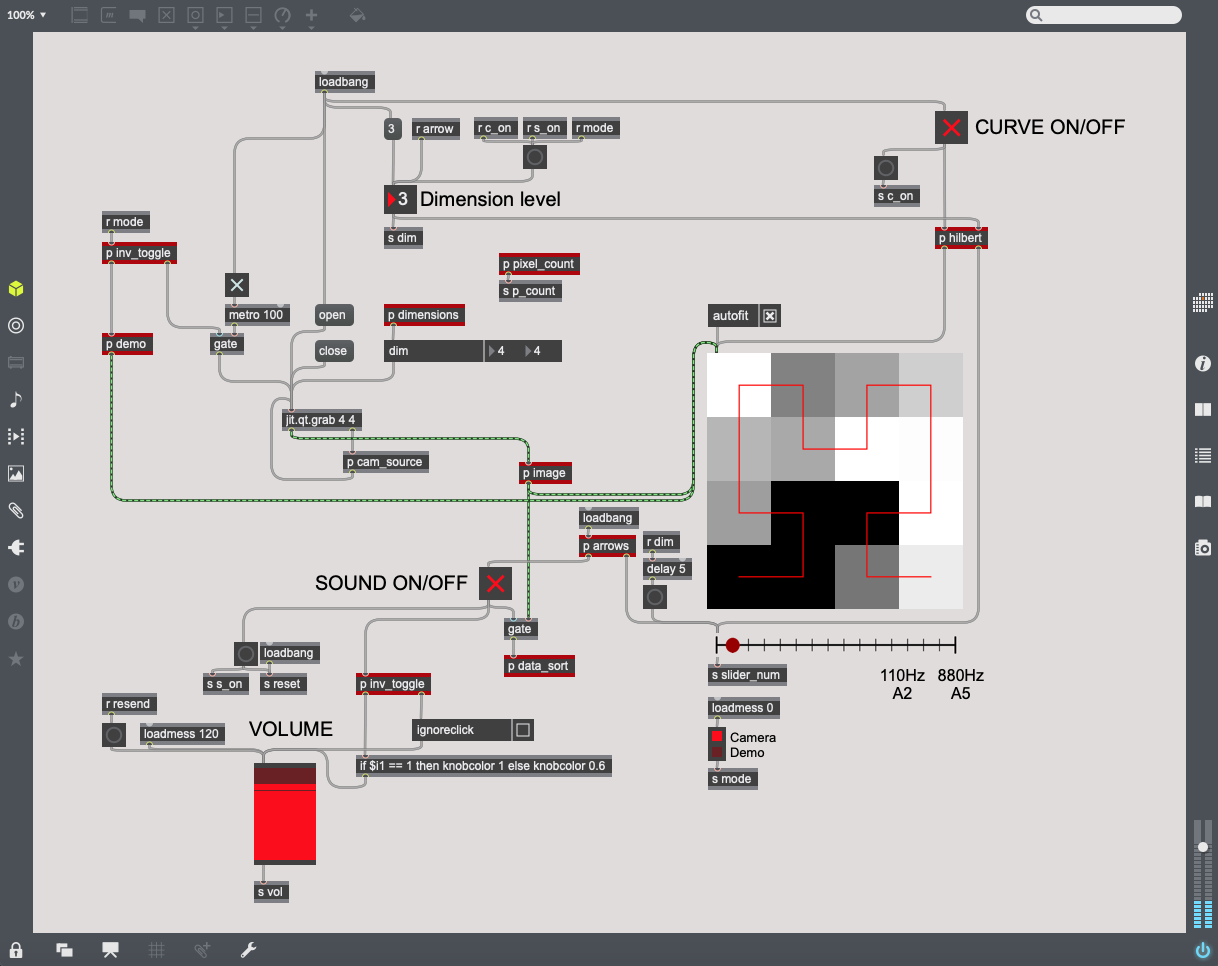 This is the main patcher. It looks complicated, but there are only two primary paths running. |
|
|
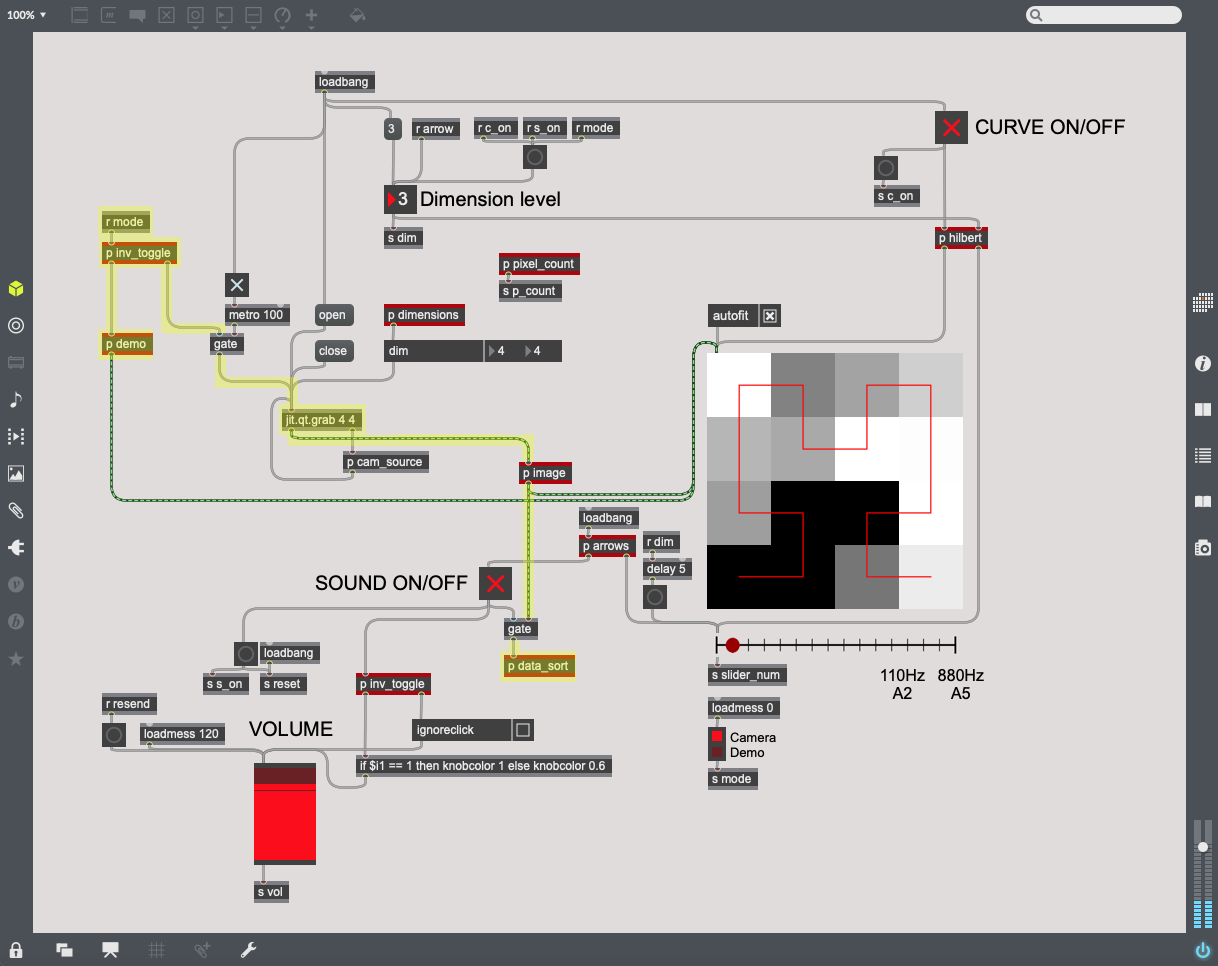 This path controls the current mode. The left branch runs the demo mode, and the right branch runs the camera mode using camera data from jit.qt.grab. The mode is directed by the subpatcher p inv_toggle, which acts as a router between 0 and 1, but with toggles. This toggle is controlled by the radiogroup with the two mode options. |
|
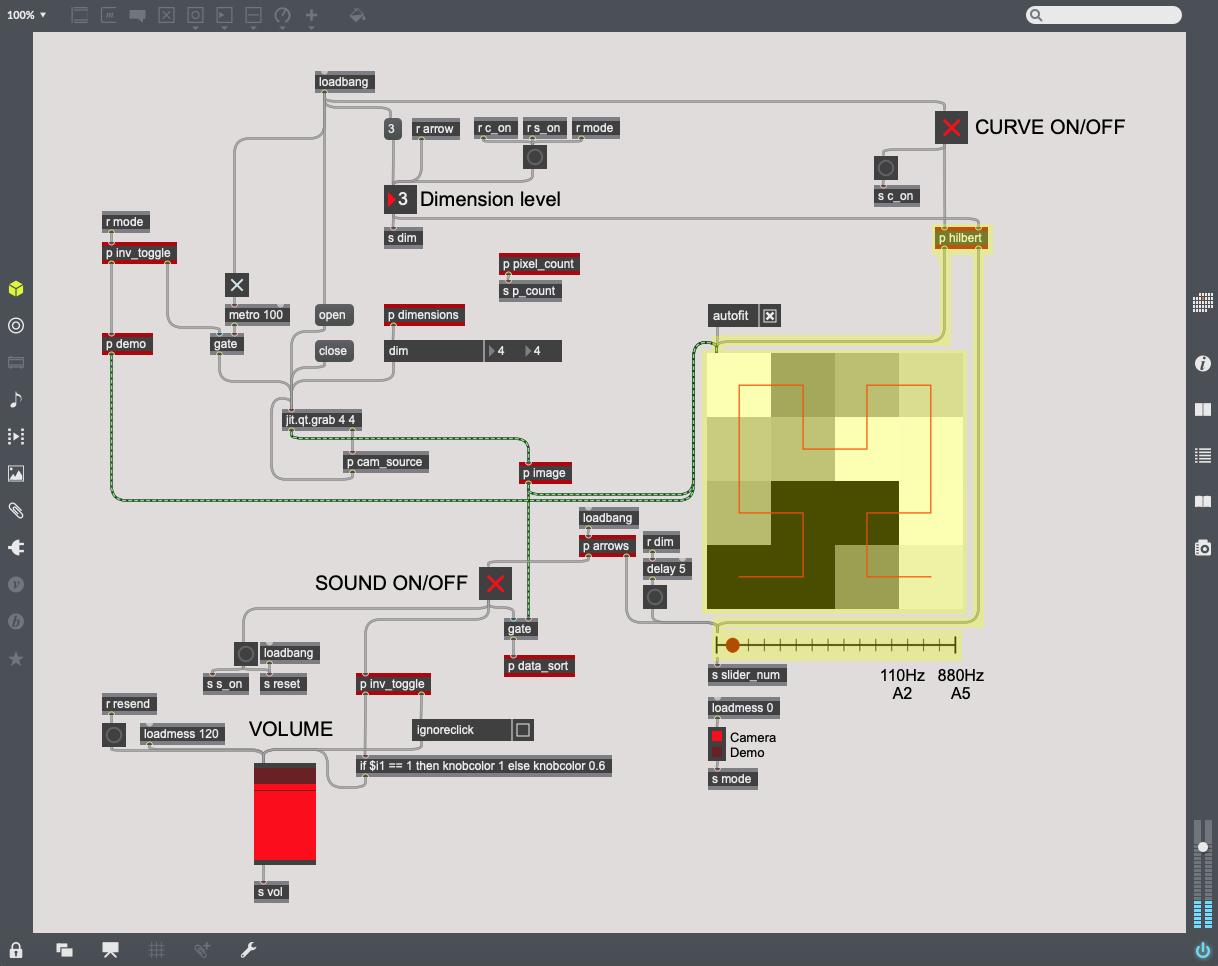 This path controls the Hilbert Curves and the sliders for each dimension level. When the dimension level changes, the subpatcher p hilbert sends the proper images of the Hilbert Curve ( pwindow) and the slider ( pictslider). |
|
|
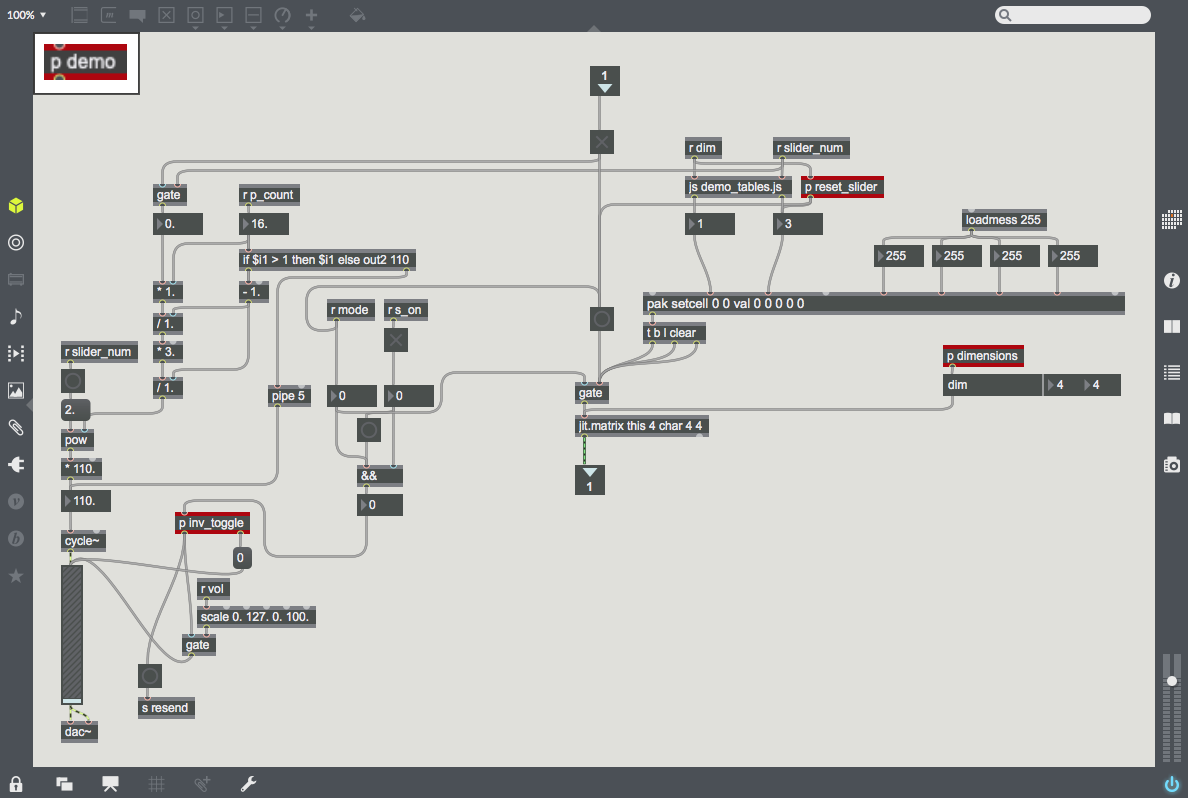 This subpatcher p demo runs the demo mode. |
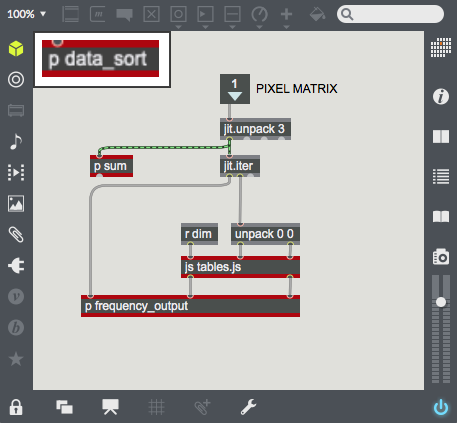 This subpatcher p data_sort runs the camera mode. |
|
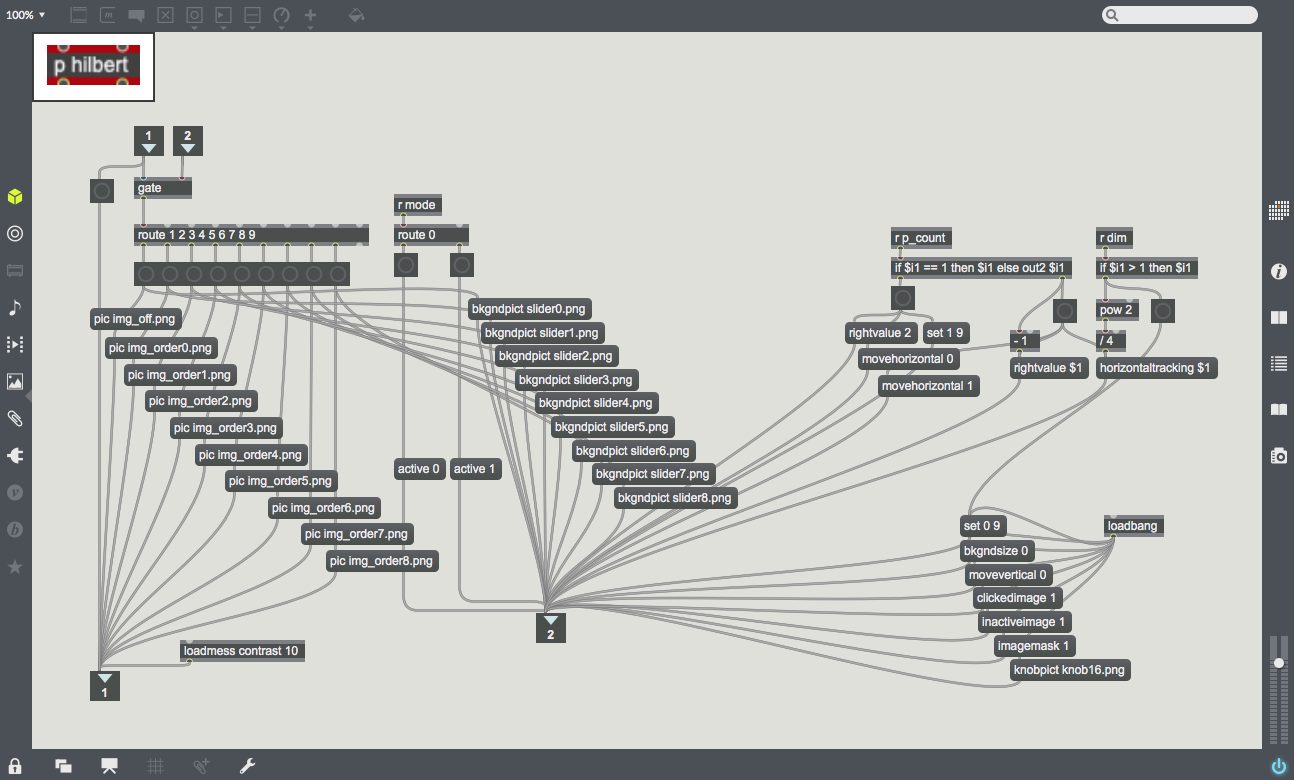 This subpatcher p hilbert sends the proper Hilbert Curves and sliders from image files. |
|
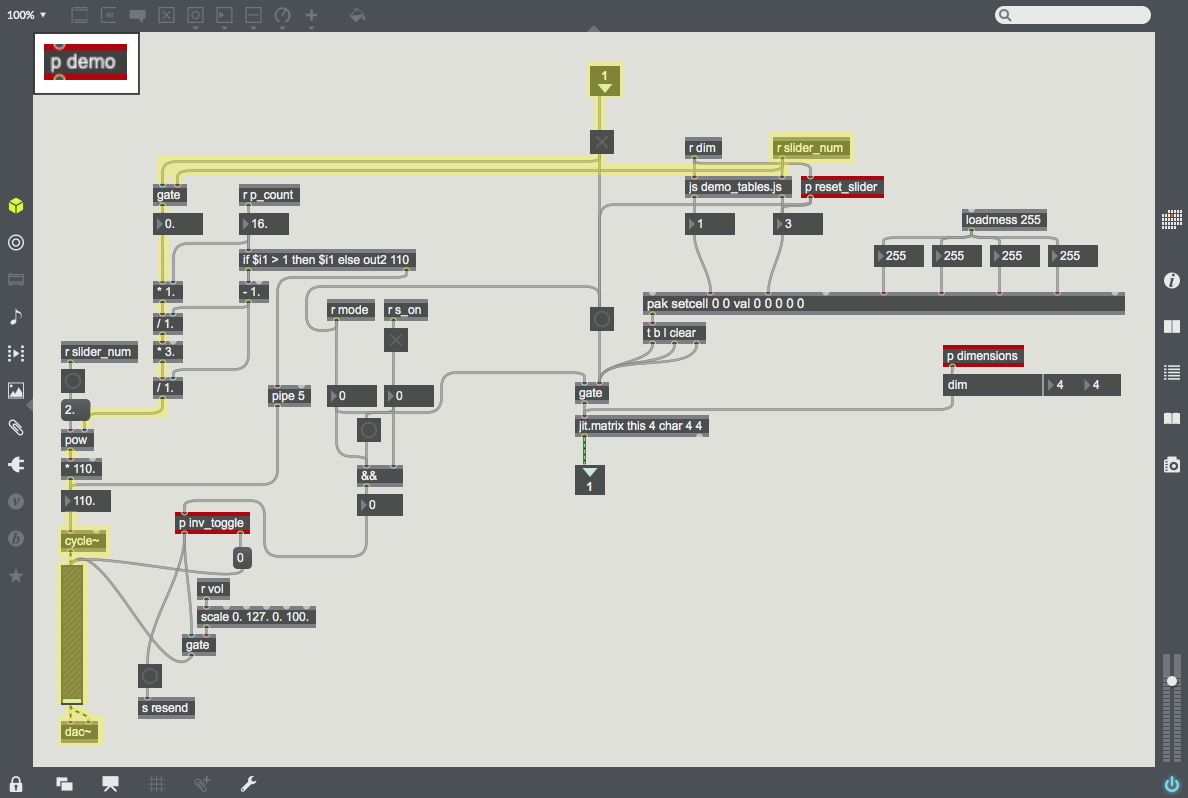 The left half of p demo uses the place along the Hilbert Curve (which is the slider value) to calculate and output that point's frequency. Then the frequency is sent through cycle~ and gain~, and finally gets outputted through dac~. |
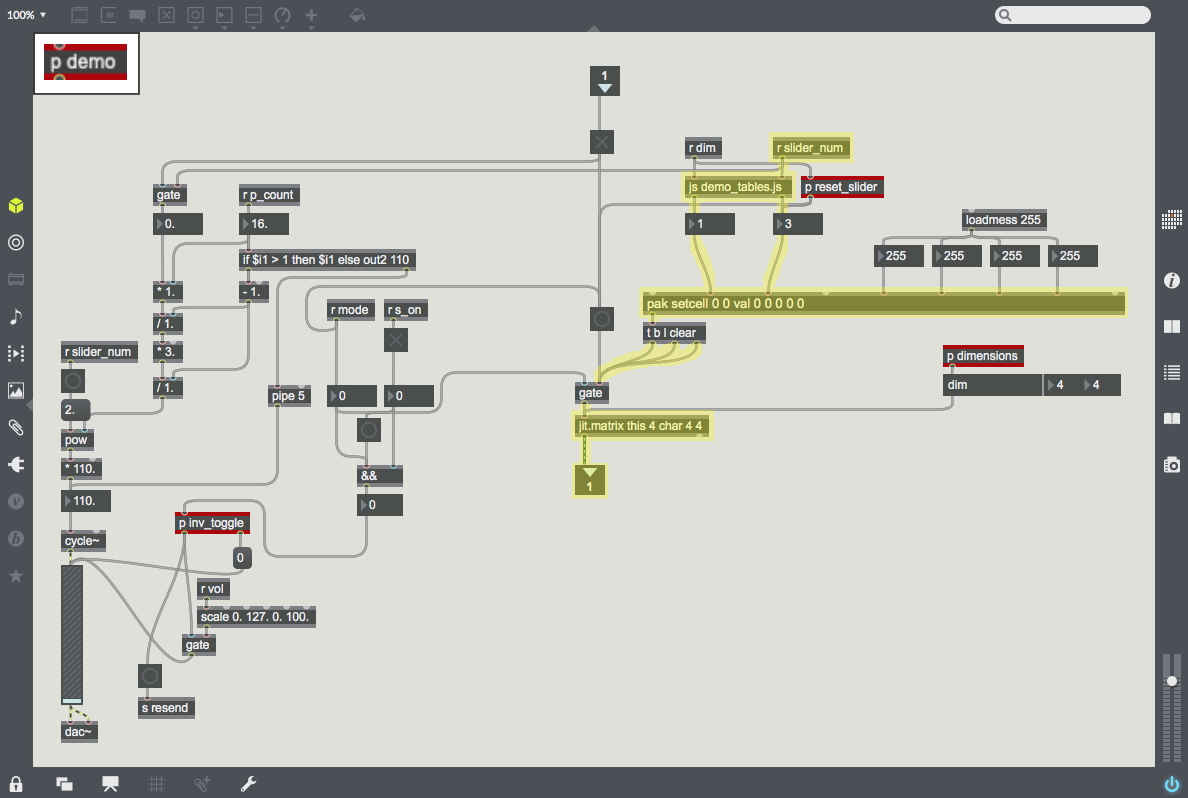 The right half of p demo uses javascript to take the place along the Hilbert Curve (which is the slider value) and output the xy-coordinates of the corresponding pixel. Then, it uses pak and jit.matrix to generate a matrix of black pixels with a white pixel at that point (x,y). |
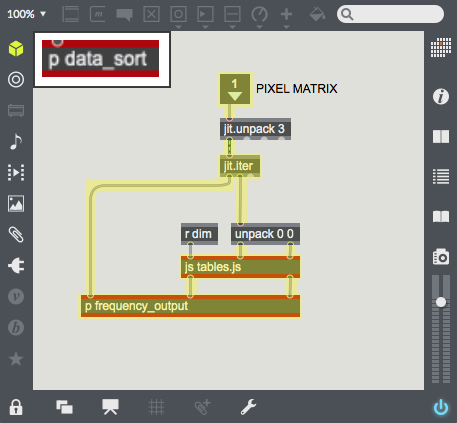 jit.iter splits the camera data into pixel coordinates and their brightness values. The javascript file takes each pixel's xy-coordinates and outputs that pixel's place on the Hilbert Curve (from first to last, when unraveled). These values are sent into the subpatcher below. |
|
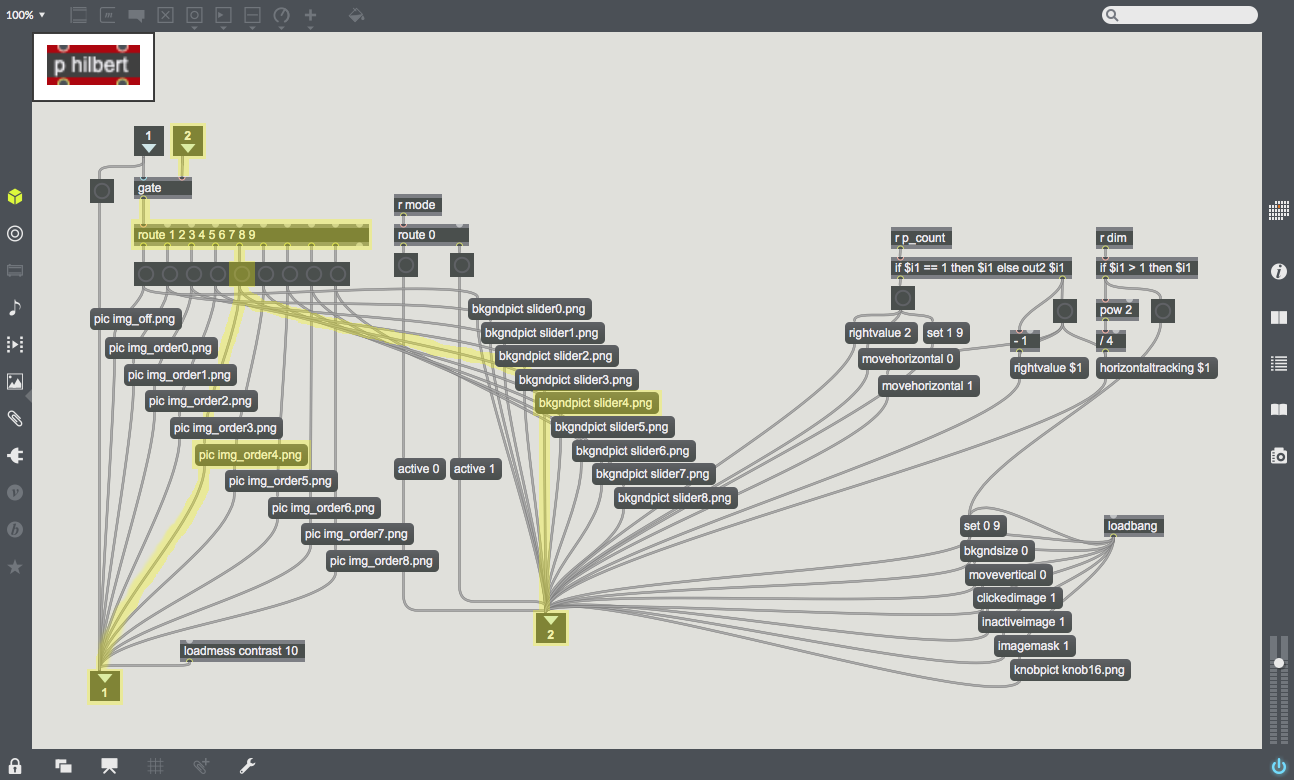 With the dimension level as an input, it gets routed and sent to a corresponding Hilbert Curve ( pic) and slider ( bkgndpict). On the far right are parameters for the slider, which is an implementation of the object pictslider. |
|
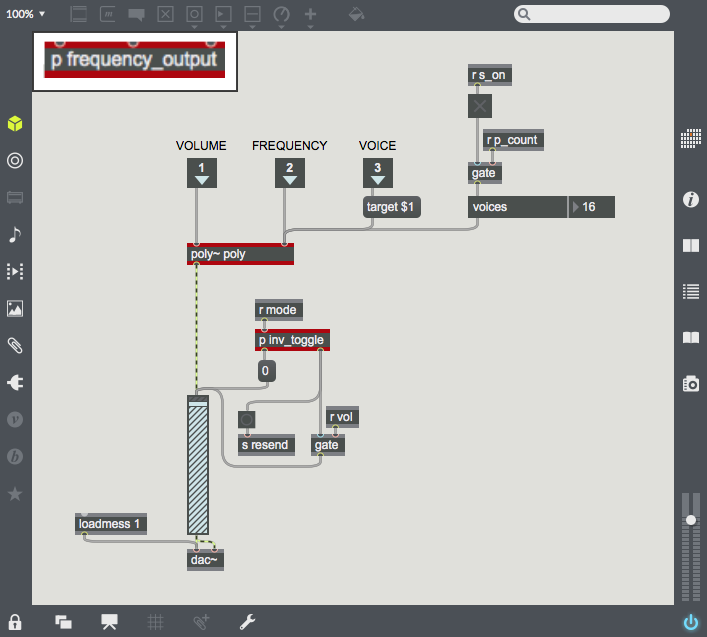 This subpatcher p frequency_output outputs the frequencies in camera mode. |
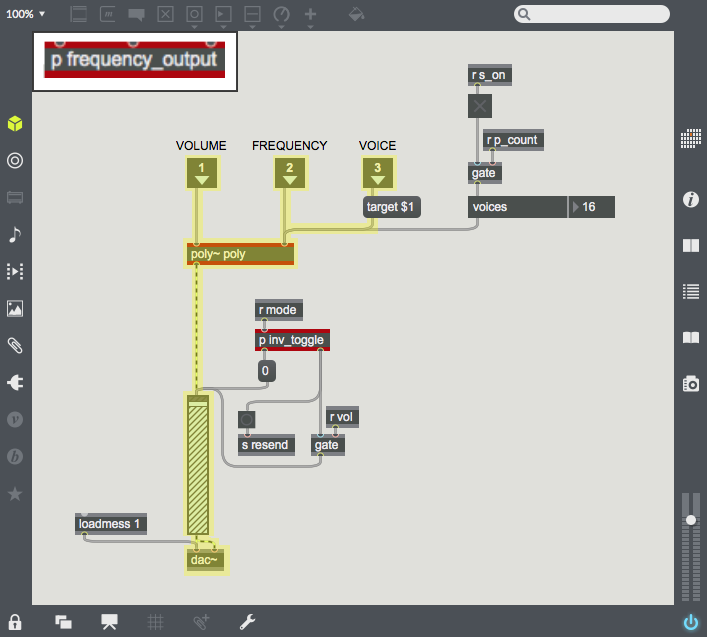 Each incoming pixel's location on the Hilbert Curve and its brightness are sent into poly~ with a unique voice. This way, every pixel can output frequencies in their own clones of poly~'s patcher. The results are sent back into a gain~ control, and finally get outputted through dac~. |
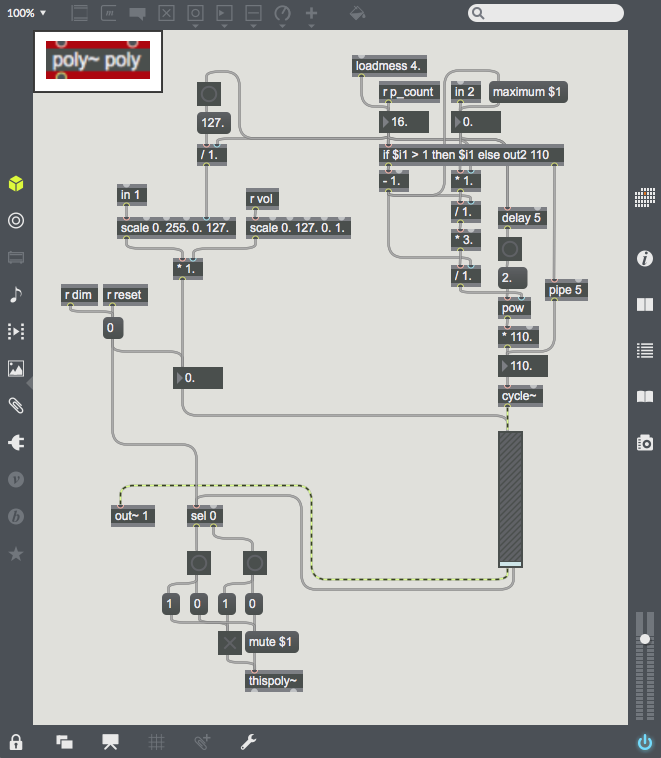 This is the poly patcher. It calculates the volumes and frequencies from the camera data. |
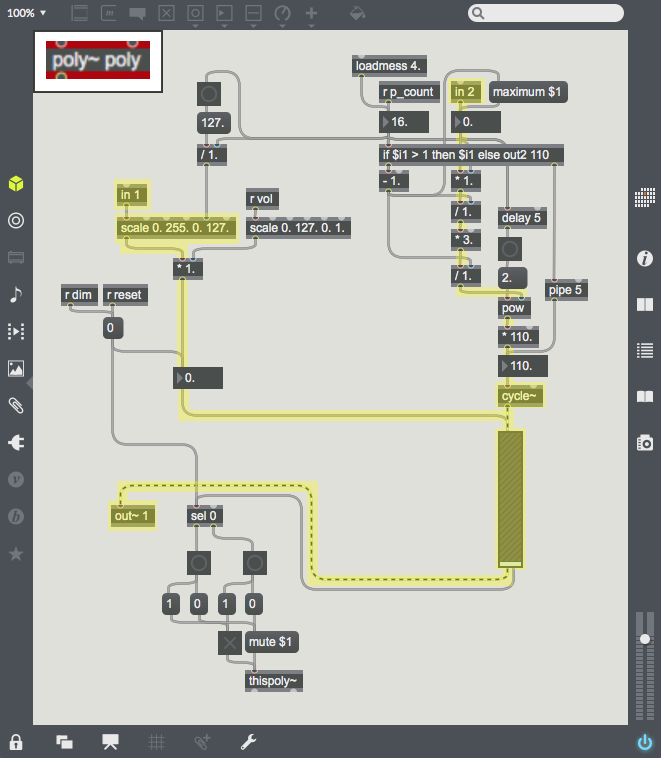 On the left, it uses the pixel's brightness value to calculate the volume. On the right, it uses the pixel's location on the Hilbert Curve to calculate the point's frequency. The two are combined with cycle~ and gain~, and then get sent back to p frequency_output with out~. |
Ben Gobler
October 2019













